
Perseverance rover : મંગળની માટી પૃથ્વી પર આવશે ! લાલ ગ્રહ પરના ખડકોમાંથી નમૂનાઓ એકત્રિત કરશે રોવર
પરસીવરેસ રોવર પાસે બે મુખ્ય મિશન છે. જેમાં પ્રથમ મંગળ પર જીવનના નિશાન શોધવાનું છે, જ્યારે બીજું મિશન સંભવિત ખગોળશાસ્ત્રીય મહત્વના કેટલાક ડઝન નમૂનાઓ એકત્રિત કરવાનું છે.

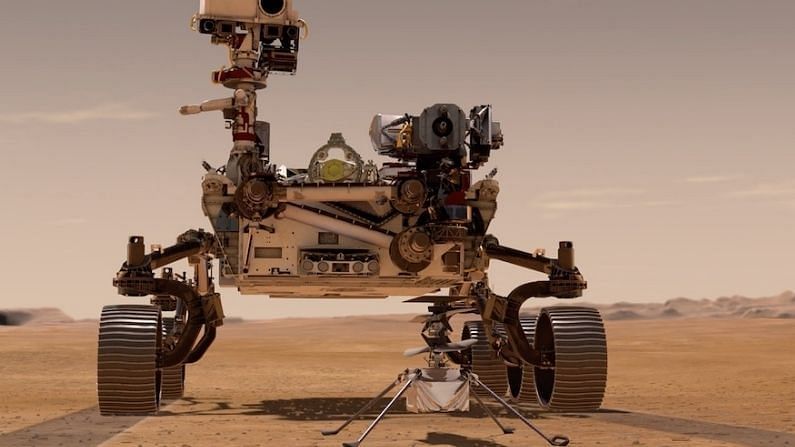
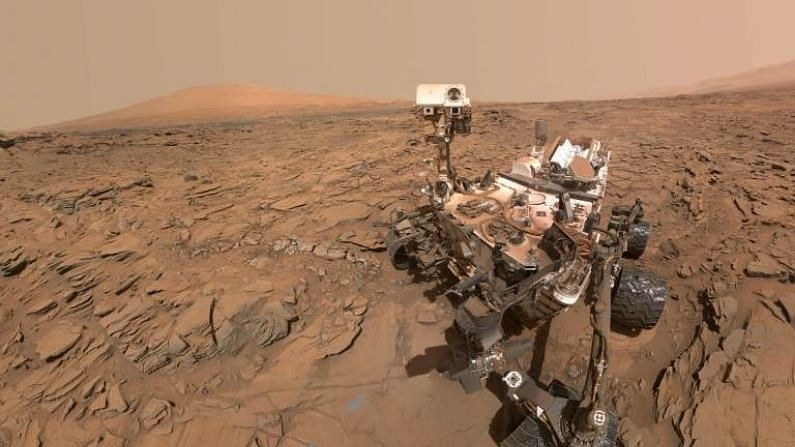
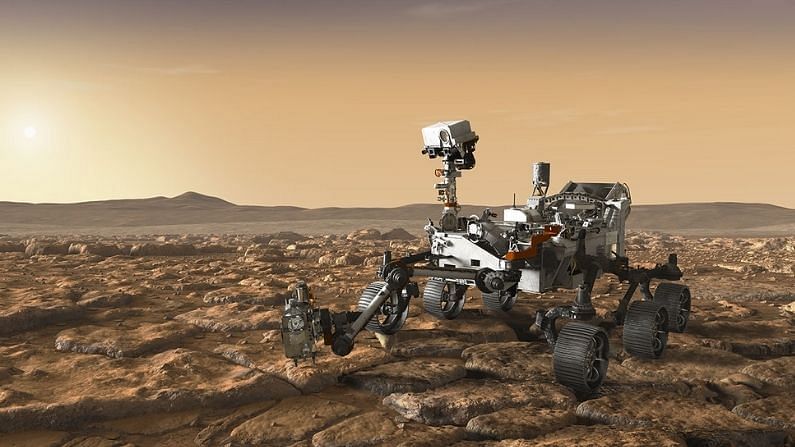
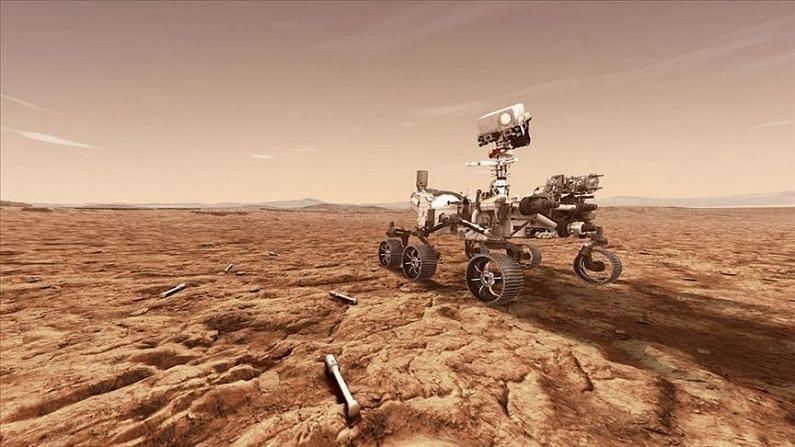
અમેરિકન સ્પેસ એજન્સી નાસાના પર્સીવન્સ રોવરે ((Perseverance Rover) તેના નવા ઘર મંગળ (Mars) પર કામ શરૂ કર્યું છે. પર્સીવન્સ રોવર પાસે બે મુખ્ય મિશન છે. જેમાં પ્રથમ મંગળ પર જીવનના નિશાન શોધવાનું છે, જ્યારે બીજું મિશન સંભવિત ખગોળશાસ્ત્રીય મહત્વના કેટલાક ડઝન નમૂનાઓ એકત્રિત કરવાનું છે.
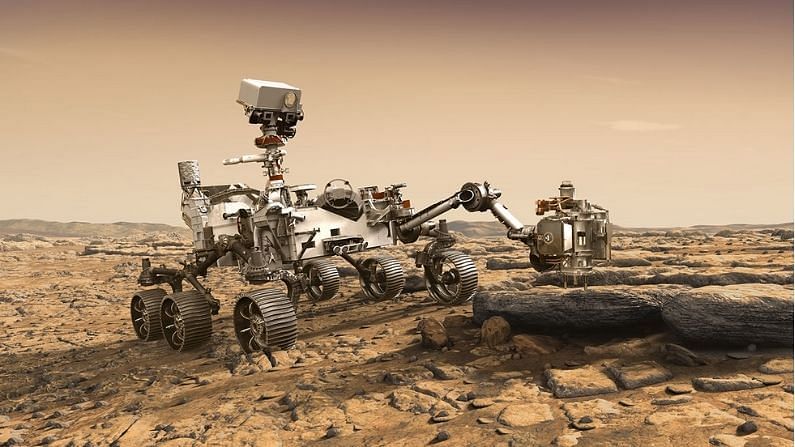
પર્સીવન્સ રોવર મંગળની સપાટીને ખંજવાળવા માટે 7 ફૂટ લાંબા રોબોટિક હાથનો ઉપયોગ કરશે. આ પછી એકત્રિત નમૂનાઓ પૃથ્વી પર મોકલવામાં આવશે. આ પ્રાચીન મંગળ સામગ્રી નાસા અને યુરોપિયન સ્પેસ એજન્સીના સંયુક્ત મિશન દ્વારા પૃથ્વી પર લાવવામાં આવશે. કદાચ આ માટે 2031 સુધીમાં એક મિશન શરૂ કરવામાં આવશે.

1 / 8
2 / 8
3 / 8

4 / 8
5 / 8
6 / 8

7 / 8
8 / 8
Related Photo Gallery


સોનામાં ₹1685 અને ચાંદીમાં ₹10,400 નો જોરદાર વધારો

ભારતીય રેલવેએ કર્યું કારનામું! હવે તો બ્રિટન, રશિયા અને ચીન પણ પાછળ

ગીઝર ચાલુ કરતા પહેલા આ ભૂલ ન કરતાં

ઉપરકોટ કિલ્લાના નામ પાછળનો શું છે ઈતિહાસ ? જાણો આખી વાર્તા

એક એવું રેલવે સ્ટેશન, જ્યાંથી દેશના દરેક ખૂણામાં સીધી ટ્રેન મળે છે

ATMમાં એક સમયે કેટલા લાખ રૂપિયા રાખી શકાય?

ભારતની સૌથી ધીમી ટ્રેન, છતાં દુનિયાભરના પ્રવાસીઓની પસંદ, જાણો નામ

આ 10 સ્ટોક આપશે 'અદભૂત રિટર્ન'! તમારી પાસે કયા શેર છે?

સ્માર્ટ ટીવીની પાવર લાઇટ પરથી જ ખબર પડી જશે TVનો ફોલ્ટ

આ શહેરોમાં યોજાશે ઈન્ટરનેશનલ કાઈટ ફેસ્ટિવલ

દેવાથી છુટકારો મેળવવા માટે આ ત્રણ સરળ રીતો તમને કોઈ નહીં જણાવે

BSNL લાવ્યું અત્યાર સુધીનો સૌથી સસ્તો પ્લાન, રોજ 5 રુપિયામાં મળશે 2GB

Jioનો ન્યૂ યર પ્લાન ! રુ 500માં 2GB ડેટા અને 12 OTTનું સબસ્ક્રિપ્શન

યાદશક્તિ વધારવા માટે તમારા આહારમાં સામેલ કરો આ સુપરફુડ્સ - Photos

ચાંદીના ભાવ કેમ આટલા વધી રહ્યા છે? કોણ ખરીદી રહ્યું છે આટલી બધી ચાંદી?

જો કોઈ બેંક નિયમોનું ઉલ્લંઘન કરે તો શું કરવું જોઈએ?

મની પ્લાન્ટમાં સિક્કો મુકવાથી શું થાય છે? જાણો વાસ્તુનો આ ઉપાય

આ 6 કલાકારો 2026માં બોલિવૂડમાં એન્ટ્રી કરશે

2025ના અંતમાં આ 3 રાશિની કિસ્મત સોનાની જેમ ચમકશે

સૂતા પહેલા અનપ્લગ કરો આ 6 ગેજેટ્સ, બચાવશે હજારોનું વીજળીનું બિલ

સપ્તાહના પહેલા દિવસે જ ઘટ્યો સોનાનો ભાવ, ચાંદીનો ભાવ પણ ઘટ્યો

શું ટ્રાફિક પોલીસને કોઈને થપ્પડ મારવાનો અધિકાર છે?

42 વર્ષ અભિનેત્રીનો આવો છે પરિવાર

આ સ્ટોકમાં કરી દો રોકાણ

વૈવાહિક જીવનમાં તણાવ આવી શકે છે, તમારા ખર્ચાઓ પર નિયંત્રણ રાખો

તમને જોઈને Dog કેમ ભસે છે? તમે નહીં જાણતા હોવ

આ '4 IPO' એ વર્ષ 2025 માં મજબૂત રિટર્ન આપ્યું

કયા દેશના લોકો સૌથી વધુ દારૂ પીવે છે? ભારત કયા નંબરે છે?

આ દિવસે ભૂલથી પણ સાવરણી ન ખરીદતા

અમદાવાદને મળશે નવું નજરાણું, બની રહ્યું છે 'રેલ કોચ રેસ્ટોરન્ટ'

દરરોજ 1 કલાક ગીઝર ચાલુ રાખશો તો કેટલુ વીજળી બિલ આવશે?

10,000mAh બેટરીવાળા 'સ્માર્ટફોન' જલ્દી જ માર્કેટમાં 'એન્ટ્રી' કરશે

વાસ્તુ દોષ દૂર કરવા માટે કરો આ ખાસ મંત્રોનો જાપ, જાણો તેના ફાયદા

રિચાર્જ મોંઘા થાય તે પહેલાં ખરીદો આ Jio પ્લાન,365 દિવસની ઝંઝટ ખતમ

મુકેશ અંબાણી લોકોને સસ્તામાં આપશે ગ્રીન અને ક્લીન એનર્જી..

આ 4 શેર રોકાણકારોને કરાવી શકે છે ડબલ નફો, એક્સપર્ટે આપી ખરીદવાની રાય

આ દેશમાં પાણી કરતાં પણ સસ્તું વેચાય છે 'પેટ્રોલ'!

દૂધ ગમે તેટલું પાતળું હોય, ચા બનશે એકદમ જાડી

શિયાળાનું સુપરફૂડ શક્કરિયા, જાણો તેના ફાયદા

આ 5 ભારતીય ખેલાડીઓ પહેલી વખત T20 વર્લ્ડ કપ રમશે

ઈચ્છામૃત્યુ અંગેનો કાયદા શું છે?

ભારતની આ 5 જગ્યા, જ્યાંથી નથી ઉડી શકતુ વિમાન, જાણો શું છે કારણ?

તમારા ઘરમાં નેગેટિવ એનર્જી છે કે નહીં? વાસ્તુના આ ઉપાયથી કરી શકશો ચેક

એન્ડ્રોઇડમાં Safe Mode શું હોય છે?ક્યારે અને કેવી રીતે ઉપયોગ કરવો જાણો

સમયસર ચુકવણી, છત્તા ક્રેડિટ સ્કોર નથી વધી રહ્યો? આ તો નથી થઈ રહીને ભૂલ

નોરા ફતેહીની કારનો અકસ્માત, નશામાં ધૂત ડ્રાઈવરે મારી ટક્કર

સતત બીજા દિવસે ઘટ્યો સોનાનો ભાવ, ચાંદીમાં પણ થોડો ઘટાડો

આવો છે ક્રિસ્ટલ ડિસોઝનો પરિવાર

આજે તમે ઉર્જાથી ભરપૂર રહેશો, બિઝનેસ પર વધુ ધ્યાન આપવાની જરૂર છે

ડિસેમ્બરમાં વિદેશી રોકાણકારોએ ₹22,000 કરોડથી વધુના શેર વેચ્યા!

ધુરંધર ફિલ્મના ડિરેક્ટરનો આવો છે પરિવાર

'બોર્ડર 2' ની અભિનેત્રીનો આવો છે પરિવાર

T20 વર્લ્ડ કપ 2026 માં ટીમ ઈન્ડિયા ક્યારે અને કોની સામે ટકરાશે?

Stock Market: 1 શેર ઉપર '2 શેર' ફ્રી! ચોખાના બિઝનેસમાં જોડાયેલી અગ્રણી કંપનીએ રોકાણકારોને ભેટ આપી

ક્રિકેટ કરતા 10 ગણી વધુ છે ફૂટબોલ વર્લ્ડ કપ 2026 ની પ્રાઈઝ મની

ગીઝર ફાટતા પહેલા તમને દેખાશે આ 5 સંકેતો, જાણી લો
ટ્રાફિક મેનેજમેન્ટ માટે AMC નો એક્શન પ્લાન તૈયાર - જુઓ Video

હરિત ઊર્જાની દિશામાં ઐતિહાસિક પગલું, ગોરજમાં સૂર્યની શક્તિનો ઉપયોગ

સોનામાં ₹1685 અને ચાંદીમાં ₹10,400 નો જોરદાર વધારો
શું ટીમ ઈન્ડિયા હજુ પણ T20 વર્લ્ડ કપ માટે સ્કવોડમાં ફેરફાર કરી શકે છે?

માલદિવની જેમ ભારતનો વિરોધ કરવાથી યુનુસને ચૂંટણીમાં લાભ થશેે કે નુકસાન?

ટ્રાફિક મેનેજમેન્ટ માટે AMC નો એક્શન પ્લાન તૈયાર - જુઓ Video
હરિત ઊર્જાની દિશામાં ઐતિહાસિક પગલું, ગોરજમાં સૂર્યની શક્તિનો ઉપયોગ
મનસુખ વસાવા-ચૈતર વસાવાના સામ સામે આક્ષેપો, જુઓ Video

વડોદરામાં આંગણવાડી બહાર જ ગંદકી અને કચરાના ગંજ, દારૂની થેલીઓએ ખોલી પોલ

નીતિન પટેલે કહ્યું- કેટલાક ભાજપનો ખેસ પહેરીને સીધા હોદ્દા માંગે છે

જૈન પરિવારની 7 વર્ષની દીકરીની દીક્ષા લેવાના નિર્ણય પર કોર્ટે લગાવી રોક

ભરૂચમાં જાહેર રસ્તા પર રીલ બનાવનાર 5 ની ધરપકડ કરાઇ

યુક્રેનમાં કેદી બનીને રખાયેલા મોરબીના યુવકનો વધુ એક Video સામે આવ્યો

ગુજરાતમાં પડશે ગાત્રો થીજવતી ઠંડી

તમારો આત્મવિશ્વાસ જાળવી રાખો, થાક અને તણાવમાંથી રાહત અનુભવશો
